Từ năm sau, mô tô xe máy từ Piaggio sẽ có thể dự đoán va chạm phía sau như ô tô
Chủ Nhật,
13/04/2025
Tuấn Anh

Piaggio hiện đang cung cấp hỗ trợ radar 4D được phát triển từ các rô-bốt tự động thông minh, với các hệ thống cảnh báo va chạm phía trước - hai bên có thể được mở rộng ra cả phía sau vào năm 2026.
Công nghệ an toàn xe máy đang phát triển nhanh chóng và Piaggio Fast Forward (PFF) đã tham gia cuộc chơi với cái mà họ gọi là nền tảng phòng ngừa va chạm dựa trên radar 4D đầu tiên trong ngành. PFF là công ty con của Piaggio – công ty mẹ của Aprilia và Moto Guzzi . Do người đi xe máy có khả năng gặp tai nạn chết người cao hơn 28 lần so với người lái ô tô, nhóm nghiên cứu tại PFF tập trung vào công nghệ đặt mục tiêu giảm thiểu rủi ro bằng Giải pháp hỗ trợ người lái xe (RAS) mới của họ.
Hệ thống sử dụng radar độ phân giải cao để phát hiện mối nguy hiểm nhiều lần mỗi giây, chạy các thuật toán để đánh giá rủi ro và đưa ra cảnh báo. Lần đầu tiên được giới thiệu trên Piaggio MP3 với cảm biến chỉ ở phía sau, RAS đã chính thức ra mắt trên Moto Guzzi Stelvio , nơi công nghệ này hiện cung cấp tính năng giám sát điểm mù, hỗ trợ chuyển làn, cảnh báo va chạm phía trước và kiểm soát hành trình theo sau.

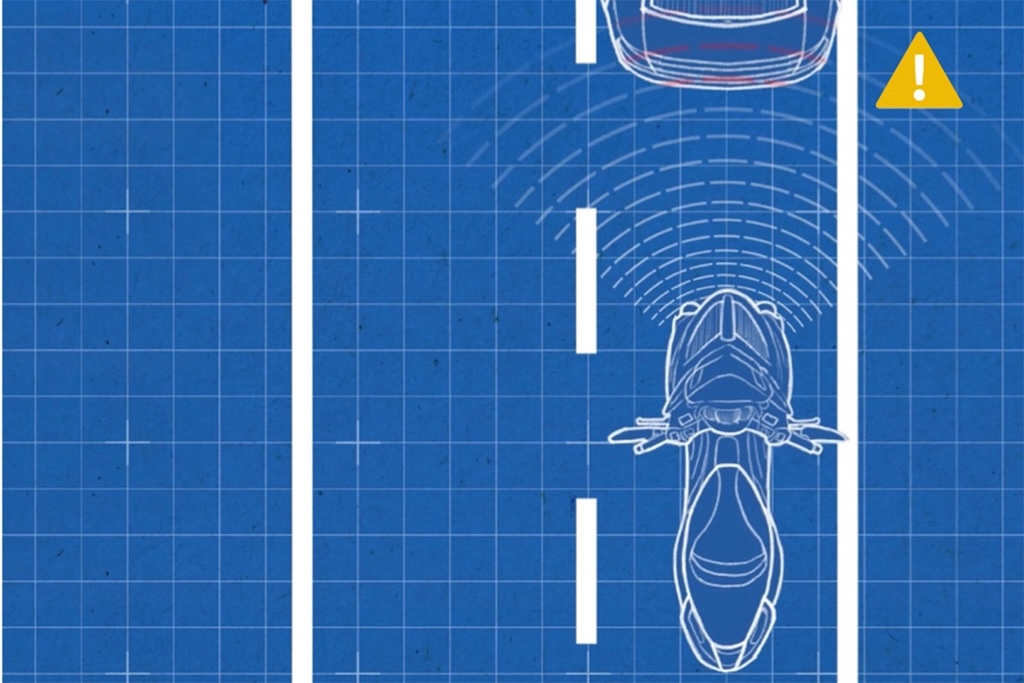
Đến cuối năm 2026, PFF tiết lộ rằng các tính năng như dự đoán va chạm phía sau khi đỗ và cảm biến lùi cũng có thể được bổ sung. RAS kết hợp các cảm biến gắn phía trước và phía sau để theo dõi tình hình giao thông xung quanh theo thời gian thực, cung cấp các cảnh báo cụ thể thông qua bảng điều khiển và gương chiếu hậu của xe.
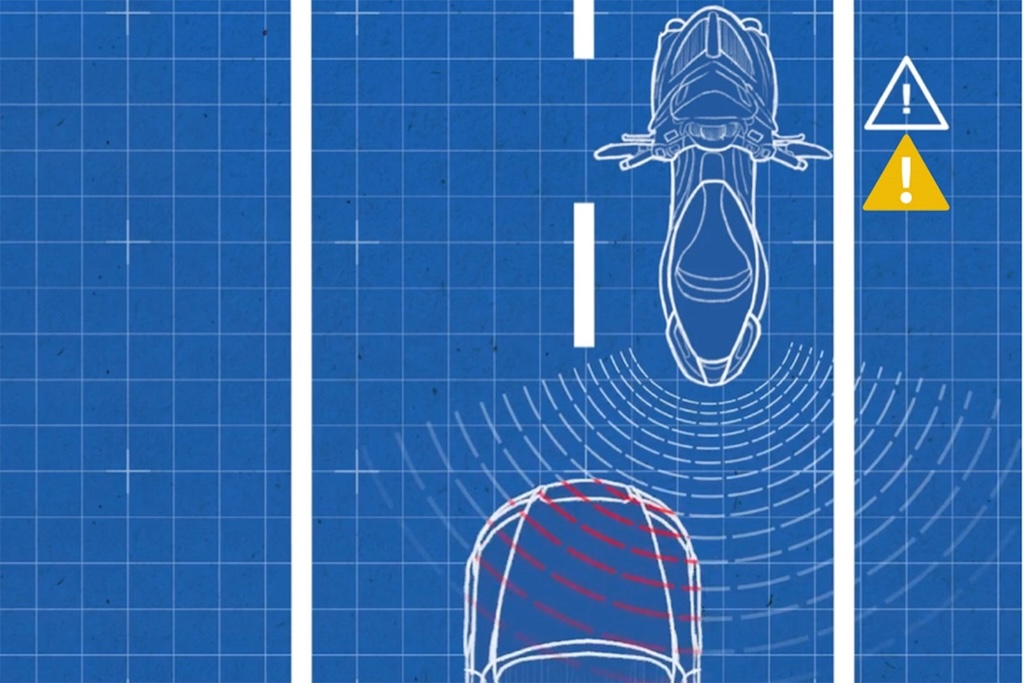
Jean-Claude Coutant, Giám đốc Công nghệ của PFF giải thích: "Cảm biến phía trước dự đoán va chạm với các phương tiện trên đường đi của bạn, trong khi cảm biến phía sau dự đoán va chạm khi bạn chuyển làn đường hoặc nếu có phương tiện nằm trong điểm mù của bạn hoặc làn đường bên cạnh". Công nghệ của PFF được thiết kế hoàn toàn để cảnh báo người lái – không phải để kiểm soát xe máy. Các mối nguy hiểm được chỉ ra thông qua cảnh báo trên bảng điều khiển, chẳng hạn như hình tam giác màu đỏ để cảnh báo va chạm phía trước.
Tuy nhiên, PFF đang tích cực khám phá các công nghệ can thiệp, chẳng hạn như phanh khẩn cấp – như được thấy trên hệ thống Bosch/KTM mới được giới thiệu trên xe bán tự động KTM 1390 Super Adventure S Evo. Hệ thống của Piaggio sử dụng cảm biến radar trên chip 4D có độ phân giải cao, nghĩa là nó theo dõi chiều cao, khoảng cách và chuyển động của các vật thể trong môi trường xung quanh.

Coutant nói thêm: "Phần mềm sẽ vạch ra một hành lang rất cụ thể mà xe đạp đi qua. Nếu xe cộ di chuyển dọc theo ngoại vi của hành lang này, chúng tôi sẽ không hành động. Chúng tôi có thể xác định mục tiêu là tĩnh hay động. Sử dụng thuật toán của chúng tôi, chúng tôi dự đoán va chạm và theo dõi nguy hiểm theo thời gian thực.”
Không giống như các hệ thống dựa trên camera, RAS sử dụng radar để hoạt động hiệu quả trong mọi điều kiện thời tiết và ánh sáng. Người phát ngôn của công ty cho biết thêm: "Chúng tôi chọn radar vì nó không bị ảnh hưởng bởi thời tiết, trong khi hệ thống camera sẽ bị ảnh hưởng bởi mưa, sương mù, bụi hoặc bóng tối".

PFF tuyên bố hệ thống của họ cung cấp độ phân giải cao nhất so với bất kỳ đối thủ cạnh tranh nào, với Coutant nói thêm: "Điều làm chúng tôi khác biệt là độ phân giải cảm biến. Độ phân giải càng cao, chúng tôi càng hiểu chính xác hơn về vị trí nguy hiểm". Hiện tại, cảm biến phía trước có thể phát hiện vật thể cách xa tới 150m, trong khi mô-đun phía sau bao phủ 30m – được cho là đủ cho tốc độ đường cao tốc. Khi phát triển, PFF hướng tới mục tiêu mở rộng phạm vi phía trước lên 300m, nhưng không xa hơn.
“Ngành công nghiệp xe máy rất nhạy cảm với chi phí,” Coutant thừa nhận. “Vì vậy, điều đầu tiên chúng tôi đang làm là tìm cách làm cho mô-đun ít tốn kém hơn. Thứ hai là nhìn xa hơn. Chúng tôi đang tìm cách đi lên đến 300m, nhưng không bắt buộc phải vượt quá con số đó.”
Hệ thống này ban đầu được phát triển cho các robot chở hàng gita bán tự động của công ty (hình trên), ban đầu chỉ sử dụng công nghệ vẽ bản đồ môi trường dựa trên camera trước khi bổ sung thêm công nghệ kết hợp radar.
“Chúng tôi đã đạt được hiệu suất tuyệt vời, vì vậy chúng tôi đã phát triển một mô-đun để sử dụng trên xe máy”, ông nói thêm. “Ưu tiên thứ ba mà chúng tôi muốn cải thiện là độ phân giải và ưu tiên cuối cùng là cải thiện khả năng của phần mềm. Ví dụ, hiện tại chúng tôi cung cấp dịch vụ hỗ trợ điểm mù và chuyển làn đường, nhưng mục tiêu của chúng tôi là dự đoán va chạm từ phía sau khi xe dừng hẳn.”
Nguồn: xedoisong.vn
Tin tức liên quan

“Xế phượt” Yamaha Tracer 9 nâng cấp tại Việt Nam có gì hấp dẫn với giá chỉ 319 triệu đồng?
“Xế phượt” Yamaha Tracer 9 nâng cấp tại Việt Nam có gì hấp dẫn với giá chỉ 319 triệu đồng? Là một trong những mẫu sport-touring/adventure tầm trung đáng chú ý nhất trên thị trường, Yamaha Tracer 9 phiên bản nâng cấp không chỉ sở hữu diện mạo hiện đại hơn mà còn được điều chỉnh giá bán theo hướng dễ tiếp cận hơn. Hiện mẫu xe được Yamaha phân phối chính hãng với mức giá 319 triệu đồng, thấp hơn đáng kể so với mức 369 triệu đồng của thế hệ trước. Ở lần nâng cấp này, thay đổi dễ nhận thấy nhất nằm ở phần đầu xe. Tracer 9 sở hữu cụm đèn pha thiết kế hoàn toàn mới, vẫn duy trì cấu hình đèn demi và đèn pha đôi quen thuộc nhưng được bổ sung công nghệ đèn chiếu sáng thích ứng. Hệ thống có khả năng nhận diện góc nghiêng của xe và tự động điều chỉnh hướng chiếu sáng khi vào cua với độ nghiêng trên 7 độ, giúp cải thiện tầm quan sát trong điều kiện vận hành thực tế. Không chỉ thay đổi về ngoại hình, Yamaha cũng tinh chỉnh lại thân xe nhằm nâng cao hiệu quả khí động học. Các chi tiết dàn áo được tối ưu để giảm tác động của gió, đồng thời tăng khả năng bảo vệ người lái trong những hành trình dài hoặc khi di chuyển ở tốc độ cao. Về mặt công thái học, Tracer 9 mới hướng tới sự thoải mái nhiều hơn cho cả người lái lẫn hành khách. Khung đuôi được kéo dài thêm 50mm, mang lại không gian ngồi rộng rãi hơn. Ghi-đông cũng được điều chỉnh lại vị trí nhằm tạo tư thế điều khiển tự nhiên hơn, trong khi kính chắn gió có thể chỉnh cơ tới 10 nấc với biên độ khoảng 50mm. Hệ thống treo tiếp tục sử dụng phuộc KYB USD đường kính 41mm phía trước kết hợp giảm xóc đơn phía sau. Tuy nhiên, Yamaha đã tinh chỉnh lại liên kết và thông số vận hành nhằm cân bằng tốt hơn giữa khả năng chạy đường dài, chở người ngồi sau và cảm giác lái thể thao khi vận hành solo. Sức mạnh của Tracer 9 vẫn đến từ khối động cơ CP3 ba xi-lanh dung tích 890cc quen thuộc. Cỗ máy này sản sinh công suất tối đa 119 mã lực tại 10.000 vòng/phút cùng mô-men xoắn cực đại 93Nm tại 7.000 vòng/phút. Điểm đáng chú ý là động cơ hiện đã đáp ứng tiêu chuẩn khí thải Euro 5+, giúp nâng cao khả năng vận hành bền bỉ và thân thiện môi trường hơn. Trang bị công nghệ tiếp tục là thế mạnh của Tracer 9 trong phân khúc. Xe sở hữu màn hình TFT màu kích thước 7 inch hỗ trợ kết nối điện thoại thông minh thông qua ứng dụng MyRide. Hệ thống cảm biến quán tính IMU 6 trục đóng vai trò quản lý các tính năng hỗ trợ lái như ABS trong cua và kiểm soát lực kéo theo góc nghiêng. Ngoài ra, Yamaha còn trang bị cho Tracer 9 hệ thống Cruise Control đi kèm giới hạn tốc độ tối đa, cổng sạc USB-C tiện dụng, hộc chứa đồ bên phải tay lái và 5 chế độ lái khác nhau. Trong đó gồm 3 chế độ cài đặt sẵn là SPORT, STREET, RAIN cùng 2 chế độ tùy chỉnh theo sở thích người sử dụng. Với mức giá 319 triệu đồng, thiết kế mới hiện đại hơn cùng hàng loạt trang bị điện tử cao cấp, Yamaha Tracer 9 tiếp tục là một trong những lựa chọn đáng cân nhắc nhất dành cho những biker yêu thích các chuyến đi đường dài nhưng vẫn muốn giữ được cảm giác lái thể thao đặc trưng của động cơ CP3. Nguồn: nghenhinvietnam.vn
17/06/2026

Yamaha MT-07 thế hệ mới chính thức cập bến Việt Nam: thiết kế lột xác, nhiều công nghệ hơn và giá dễ tiếp cận hơn Honda CB650R
Yamaha MT-07 thế hệ mới chính thức cập bến Việt Nam: thiết kế lột xác, nhiều công nghệ hơn và giá dễ tiếp cận hơn Honda CB650R Sau 4 năm vắng bóng, Yamaha MT-07 đã chính thức trở lại thị trường Việt Nam với thế hệ hoàn toàn mới. Mẫu naked bike tầm trung này không chỉ sở hữu diện mạo streetfighter hiện đại hơn mà còn được Yamaha nâng cấp mạnh về trang bị, công nghệ và cảm giác lái, trong khi giá bán niêm yết lại hấp dẫn hơn so với nhiều đối thủ cùng phân khúc. Khi hệ thống mô tô phân khối lớn Revzone được Yamaha khai trương tại Việt Nam vào năm 2022, MT-07 từng được phân phối với mức giá 259 triệu đồng. Dù nổi tiếng nhờ khả năng vận hành thú vị và động cơ giàu cảm xúc, mẫu xe này vẫn khá kén khách bởi thiết kế gây tranh cãi, trang bị chưa thực sự nổi bật và mức giá ngang ngửa Honda CB650R thời điểm đó. Với thế hệ mới nhất, Yamaha đã giải quyết gần như toàn bộ những điểm hạn chế này. Dù được nâng cấp toàn diện, trái tim của MT-07 vẫn là khối động cơ CP2 xi-lanh đôi song song dung tích 690cc đã làm nên tên tuổi của dòng xe. Động cơ chỉ được tinh chỉnh để đáp ứng tiêu chuẩn khí thải mới, trong khi hiệu năng gần như giữ nguyên với công suất 73,4PS tại 8.750 vòng/phút và mô-men xoắn cực đại 68Nm tại 6.500 vòng/phút. Lần đầu tiên trên MT-07, Yamaha trang bị hệ thống bướm ga điện tử, mở đường cho hàng loạt tính năng hỗ trợ lái hiện đại. Bên cạnh đó, xe còn được tích hợp công nghệ khuếch đại âm thanh nạp tương tự đàn anh MT-09, giúp người lái cảm nhận rõ hơn âm thanh đặc trưng của động cơ trong quá trình vận hành. Để tăng trải nghiệm cảm xúc, Yamaha đã thay đổi thiết kế hệ thống nạp khí với bốn cửa hút gió đặt trên bình xăng 14 lít hoàn toàn mới. Theo hãng, âm thanh từ động cơ sẽ được truyền tới người lái rõ rệt nhất khi thoát cua ở tốc độ thấp với độ mở ga từ 25 đến 50%. Ngoài việc cải thiện âm thanh vận hành, MT-07 mới còn được trang bị ly hợp hỗ trợ và chống trượt, giúp việc dồn số mượt mà hơn, đồng thời giảm khoảng 22% lực bóp côn so với trước. Tổng trọng lượng xe hiện ở mức 183kg. Đáng chú ý, con số này vẫn nhẹ hơn thế hệ cũ 1kg dù MT-07 đã được bổ sung thêm khoảng 4kg công nghệ và trang bị mới. Để đạt được điều đó, Yamaha áp dụng nhiều giải pháp giảm trọng lượng. Nổi bật nhất là bộ mâm 17 inch công nghệ Spin Forged tương tự MT-09, giúp giảm gần 500g khối lượng không được treo và cắt giảm khoảng 4% quán tính quay ở cả hai bánh. Dàn áo mới cũng được thiết kế theo phong cách của MT-09, nhẹ hơn khoảng 600g so với trước. Ngoài ra, nhiều chi tiết nhỏ như nắp bình xăng hay bộ truyền động xích cũng được tối ưu nhằm tiết kiệm từng gam trọng lượng. Nhìn tổng thể, MT-07 vẫn giữ được dáng vẻ quen thuộc vốn làm nên bản sắc của dòng Hyper Naked. Tuy nhiên, phần đầu xe nay được thiết kế tối giản và sắc nét hơn, kết hợp cùng bình xăng tạo hình mới mang lại vẻ ngoài hiện đại hơn. Các hốc gió bên hông phía sau phuộc trước đã được loại bỏ, trong khi đuôi xe cũng được tinh chỉnh lại nhưng vẫn duy trì khả năng chở thêm hành khách. Yamaha cho biết tư thế lái trên MT-07 thế hệ mới được điều chỉnh theo hướng thể thao hơn nhưng vẫn thân thiện với người mới làm quen mô tô phân khối lớn. Chiều cao yên chỉ 805mm kết hợp với động cơ CP2 có bề ngang nhỏ giúp người lái dễ chống chân hơn. Tay lái được mở rộng thêm 18mm, hạ thấp 22mm và kéo gần người lái hơn 9,3mm. Trong khi đó, gác chân được hạ thấp 10mm để tạo không gian thoải mái hơn cho những người có thể hình cao lớn. Thiết kế yên xe mới cũng hỗ trợ người lái kẹp gối vào bình xăng tốt hơn khi vận hành ở tốc độ cao hoặc vào cua liên tục. Toàn bộ tư thế ngồi mới được xây dựng trên bộ khung thép ống hoàn toàn mới nặng 14,8kg. Theo Yamaha, độ cứng xoắn, độ cứng dọc và độ cứng ngang đều tăng từ 12-13% so với trước. Khung xe đồng thời được kết nối với gắp sau mới...
16/06/2026

Từng góp phần đưa Harley-Davidson vượt qua giai đoạn khó khăn, huyền thoại Super Glide trở lại dưới dạng bản đặc biệt của Street Bob
Từng góp phần đưa Harley-Davidson vượt qua giai đoạn khó khăn, huyền thoại Super Glide trở lại dưới dạng bản đặc biệt của Street Bob Tiếp tục khai thác kho di sản đồ sộ thông qua bộ sưu tập Icon Collection, Harley-Davidson đã lựa chọn một trong những cái tên quan trọng nhất lịch sử hãng để tái hiện trong năm 2026. Mẫu xe đó là Super Glide – chiếc cruiser được xem là “factory custom” đầu tiên của Harley-Davidson và là nền móng cho sự hình thành của phân khúc cruiser hiện đại. Phiên bản đặc biệt mới mang tên Harley-Davidson Super Glide được phát triển nhằm tri ân chiếc FX Super Glide ra mắt năm 1971, một mẫu xe có tầm ảnh hưởng sâu rộng tới ngành công nghiệp mô tô Mỹ trong hơn nửa thế kỷ qua. Được nhiều người xem là một trong những sản phẩm quan trọng nhất của Harley-Davidson kể từ thập niên 1970, FX Super Glide chính là chiếc xe mở màn cho xu hướng xe độ xuất xưởng từ nhà máy. Dù thiết kế đuôi thuyền đặc trưng của đời đầu không nhận được nhiều sự yêu thích và nhanh chóng bị loại bỏ trên phiên bản 1972, Super Glide vẫn trở thành cột mốc đưa Harley bước sang một chương mới, kết nối chặt chẽ hơn với khách hàng cũng như văn hóa xe độ đang phát triển mạnh mẽ thời bấy giờ. Không chỉ tạo nên một phân khúc hoàn toàn mới, Super Glide còn được xem là mẫu xe góp phần giúp Harley-Davidson vượt qua giai đoạn cạnh tranh khốc liệt đầu thập niên 70. Vào năm 1970, danh mục sản phẩm của Harley-Davidson chủ yếu xoay quanh dòng touring cỡ lớn và Sportster. Trong khi đó, các nhà sản xuất Nhật Bản liên tục tung ra những mẫu xe mang tính cách mạng như Honda CB750 hay Kawasaki Z1, khiến thị trường mô tô phân khối lớn thay đổi nhanh chóng. Trong bối cảnh đó, một nhà thiết kế trẻ vừa tốt nghiệp trường Art Center College of Design tại Pasadena đã nhận ra xu hướng độ xe đang bùng nổ trên khắp nước Mỹ. Ông quan sát cách người dùng và các xưởng độ biến tấu những chiếc Harley theo phong cách riêng, rồi nảy ra ý tưởng kết hợp phần khung và động cơ của dòng FL touring với đầu xe Sportster gọn nhẹ hơn. Kết quả là chiếc FX ra đời, biến một mẫu Electra Glide cồng kềnh thành chiếc Super Glide hoàn toàn mới. Người đứng sau ý tưởng táo bạo đó chính là Willie G. Davidson – nhân vật được Harley-Davidson tuyển dụng từ năm 1963 và cũng là người tạo nên chiếc FX đầu tiên trong sự nghiệp thiết kế của mình. Theo Björn Shuster, Giám đốc Thiết kế Harley-Davidson, điều đặc biệt ở Willie G. Davidson là khả năng nắm bắt văn hóa xe độ đường phố và đưa tinh thần đó vào sản phẩm thương mại. Ông nhận thấy những chiếc chopper thời bấy giờ được thay đổi hàng loạt chi tiết để tạo nên ngoại hình khác biệt. Từ đó, Willie G. Davidson đã loại bỏ nhiều trang bị touring dư thừa trên dòng FL, kết hợp phần đầu xe Sportster nhỏ gọn hơn để tạo nên một chiếc mô tô đơn giản, nhẹ nhàng và thuần chất lái hơn. Chính sự thay đổi này đã tạo nên tỷ lệ thân xe hoàn toàn mới, đồng thời mở ra một phân khúc cruiser tồn tại và phát triển suốt hơn 55 năm qua. Đó cũng là lý do Harley-Davidson quyết định hồi sinh cái tên Super Glide sau hơn nửa thế kỷ. Phiên bản đặc biệt mới được sản xuất giới hạn 2.500 chiếc đánh số thứ tự riêng, chỉ dành cho thị trường Mỹ và Canada với giá bán 15.999 USD. Khác với nguyên bản năm 1971 sử dụng nền tảng FL touring, Super Glide thế hệ mới được phát triển từ Street Bob thuộc dòng Softail hiện đại. Theo Harley-Davidson, Softail sở hữu tỷ lệ hình khối gần với chiếc FX nguyên bản hơn so với các dòng touring ngày nay. Đây là nền tảng phù hợp nhất để tái hiện tinh thần của Super Glide trong thời đại mới. Về ngoại hình, chiếc Street Bob đã được “biến hóa” với lớp sơn trắng ngọc Onyx Pearl kết hợp các mảng màu lấy cảm hứng trực tiếp từ Super Glide đời đầu. Xe đồng thời sở hữu hàng loạt chi tiết mạ chrome sáng bóng, thể hiện thế mạnh lâu năm của Harley-Davidson trong lĩnh vực hoàn thiện bề mặt và sơn thủ công. Bên dưới lớp áo hoài cổ là nền tảng kỹ thuật Softail hiện đại. Super Glide 2026.5 sử dụng động cơ Milwaukee-Eight 117 dung tích 1.923cc, sản sinh công suất...
15/06/2026

Vừa ra mắt thế hệ mới, Ducati DesertX đã có ngay phiên bản kỷ niệm 100 năm với cảm hứng từ mẫu xe đua trên băng độc nhất lịch sử hãng
Vừa ra mắt thế hệ mới, Ducati DesertX đã có ngay phiên bản kỷ niệm 100 năm với cảm hứng từ mẫu xe đua trên băng độc nhất lịch sử hãng Ducati tiếp tục hoàn thiện bộ sưu tập xe kỷ niệm 100 năm thành lập bằng việc giới thiệu DesertX 100 – phiên bản đặc biệt dựa trên mẫu adventure mới nhất của hãng. Đây cũng là cái tên cuối cùng xuất hiện trong series Centenary Collection, mang theo nhiều dấu ấn lịch sử được tái hiện từ những mẫu xe biểu tượng từng góp phần tạo nên tên tuổi Ducati. Điểm nhấn lớn nhất trên DesertX 100 nằm ở bộ tem vàng phối sọc xanh đặc trưng. Thiết kế này được lấy cảm hứng từ chiếc Pantah “Ice” năm 1981 – một trong những dự án quảng bá sản phẩm độc đáo và khác thường nhất mà Ducati từng thực hiện. Thực chất, Pantah “Ice” là phiên bản được chỉnh sửa từ mẫu Pantah 500 tiêu chuẩn. Xe được trang bị lốp gai chuyên dụng và loại bỏ hoàn toàn hệ thống phanh để phục vụ các màn trình diễn trên đường đua băng tuyết. Vào đầu thập niên 1980, Ducati hoạt động dưới sự quản lý của EFIM – tập đoàn nhà nước Ý cũng nắm quyền kiểm soát thương hiệu ô tô Alfa Romeo. Khi đó, EFIM tổ chức một giải đua Alfasud trên các cung đường băng ở dãy Alps. Trong khoảng thời gian nghỉ giữa các lượt thi đấu, những chiếc Pantah “Ice” với màu sắc nổi bật được đưa ra trình diễn, tạo nên những màn biểu diễn đầy ấn tượng cho khán giả. Pantah “Ice” từng được sản xuất với nhiều phối màu khác nhau, nhưng Ducati lựa chọn phiên bản vàng kết hợp sọc xanh – chiếc xe từng được lưu giữ trong bộ sưu tập của Bảo tàng Ducati – làm nguồn cảm hứng cho DesertX 100 ngày nay. Ngoài bộ tem mang tính lịch sử, DesertX 100 còn sở hữu nhiều chi tiết nhận diện riêng. Xe được trang bị yên Alcantara cao cấp với logo Ducati 100 thêu nổi, đi kèm bảng tên phiên bản và số thứ tự sản xuất được khắc trên tấm kim loại Centenary Bronze gắn tại khu vực gù kẹp ghi-đông. Để nhấn mạnh khả năng chinh phục địa hình, Ducati còn bổ sung chắn bùn trước dạng cao và lưới bảo vệ két nước bằng nhôm. Một số phụ kiện tiêu chuẩn như vòng trang trí nắp bình xăng Centenary Bronze hay lưới bảo vệ đèn pha được cung cấp kèm theo, tuy nhiên các chi tiết này chỉ dành cho mục đích sử dụng ngoài đường công cộng. DesertX 100 cũng là mẫu xe đặc biệt mới nhất trong danh mục Centenary Collection, khi thế hệ DesertX hoàn toàn mới chỉ vừa được Ducati trình làng vào tháng 2 năm nay. Thế hệ thứ hai của DesertX được phát triển từ kinh nghiệm thực tế mà Ducati tích lũy qua nhiều năm tham gia các thử thách off-road khắc nghiệt trên thế giới. Những sự kiện như Erzbergrodeo, Rally Albania, Transanatolia hay hành trình hơn 1.500km xuyên sa mạc tại NORRA Mexican 1000 Rally đều góp phần định hình nên chiếc DesertX mới. Nhân dịp chuyển sang sử dụng động cơ V2 thế hệ mới, Ducati đã tái thiết kế gần như toàn bộ nền tảng khung gầm của DesertX, dù tổng thể ngoại hình vẫn giữ nguyên ADN quen thuộc. Phần đầu xe được hạ thấp 20mm nhằm cải thiện cảm giác điều khiển và tăng sự linh hoạt. Các đường nét thân xe, dàn áo và cụm đèn pha được làm mới theo hướng hiện đại hơn nhưng vẫn duy trì phong cách rally đặc trưng. Ducati cũng tối ưu khả năng sử dụng thực tế bằng các giải pháp như hệ thống dẫn gió giúp giảm nhiệt cho người lái và bình nhiên liệu được thiết kế gọn hơn, đi kèm các tấm bảo vệ nhựa nhằm tăng khả năng chống va đập khi off-road. Khu vực đuôi xe theo đuổi triết lý tối giản và thiên về kỹ thuật. Thiết kế này cho phép chủ xe dễ dàng lắp thêm bình xăng phụ, giá hành lý, tay nắm cho người ngồi sau hoặc khung thùng mà không ảnh hưởng tới kết cấu vận hành của xe. Việc hạn chế các chi tiết ốp nhựa và sử dụng cụm đèn hậu tối giản cũng góp phần làm nổi bật chất phiêu lưu đặc trưng của DesertX. Nguồn sức mạnh của mẫu xe đến từ động cơ Ducati V2 dung tích 890cc hoàn toàn mới. Đây là động cơ hai xi-lanh 4 van mỗi xi-lanh nhẹ nhất mà Ducati từng sản xuất. Nhờ hệ thống điều khiển thời điểm đóng mở van nạp biến thiên...
10/06/2026

Ducati Scrambler 100 ra mắt: khoác màu sắc nguyên bản của chiếc Scrambler đầu tiên để kỷ niệm 100 năm thương hiệu
Ducati Scrambler 100 ra mắt: khoác màu sắc nguyên bản của chiếc Scrambler đầu tiên để kỷ niệm 100 năm thương hiệu Là một trong những dòng xe thành công nhất của Ducati, Scrambler đương nhiên không thể thiếu phiên bản đặc biệt trong dịp kỷ niệm 100 năm thành lập hãng. Và lần này, Ducati đã lựa chọn trở về với cội nguồn khi giới thiệu Scrambler 100, mẫu xe lấy cảm hứng trực tiếp từ chiếc 250 Scrambler ra đời năm 1962 – mẫu Scrambler đầu tiên trong lịch sử thương hiệu Ý. Bộ tem trên Scrambler 100 được phát triển dựa trên chiếc 250 Scrambler nguyên bản, mẫu xe được Ducati sản xuất riêng cho thị trường Mỹ vào đầu thập niên 1960. Đây cũng là chiếc xe đặt nền móng cho một trong những dòng sản phẩm biểu tượng nhất của hãng cho đến ngày nay. Lịch sử của Scrambler gắn liền với Joe Berliner – nhà nhập khẩu Ducati đầu tiên tại Mỹ. Vào thời điểm đó, Berliner mong muốn Ducati phát triển một mẫu xe phù hợp hơn với nhu cầu sử dụng tại các bang của Mỹ, đặc biệt là những cung đường đất và địa hình hỗn hợp. Ý tưởng này xuất hiện trong bối cảnh Ducati đang nhận được nhiều sự chú ý từ chuyến hành trình vòng quanh thế giới năm 1957 của hai nhà thám hiểm Leopoldo “Poldino” Tartarini và Giorgio Monetti trên những chiếc Ducati 175. Thành công về mặt truyền thông của chuyến đi đã giúp thương hiệu đến từ Bologna được biết đến nhiều hơn tại Mỹ – thị trường mà trước đó gần như chưa có dấu ấn đáng kể. Nhận thấy tiềm năng phát triển, Berliner đề nghị Ducati chế tạo một mẫu xe có khả năng vận hành linh hoạt trên đường đất. Kết quả là chiếc 250 Scrambler ra đời vào năm 1962, mở đầu cho hành trình phát triển kéo dài hơn nửa thế kỷ của dòng Scrambler. Khác với sắc vàng quen thuộc thường thấy trên các thế hệ Scrambler hiện đại, chiếc 250 Scrambler dành cho thị trường Mỹ sử dụng tông xanh ngọc kết hợp bạc đầy nổi bật. Bên cạnh đó là logo Ducati đặt cạnh hình đại bàng, một chi tiết gợi nhớ tới quốc kỳ và biểu tượng nước Mỹ. Phiên bản Scrambler 100 mới được phát triển dựa trên nền tảng của Scrambler Nightshift. Để tăng giá trị sưu tầm, Ducati trang bị cho xe yên bọc Alcantara cao cấp với logo Ducati 100 thêu nổi. Phần ghi-đông sử dụng gù CNC anodized màu đen, đi kèm bảng kỷ niệm Centenary Bronze khắc tên phiên bản và số thứ tự sản xuất. Nắp bình xăng bằng nhôm CNC do Rizoma cung cấp cũng được bổ sung, kết hợp cùng vòng trang trí màu đồng Centenary tạo điểm nhấn đặc biệt cho phiên bản kỷ niệm này. Dù thuộc thế hệ Scrambler thứ hai với nhiều thay đổi về thiết kế, mẫu xe vẫn duy trì trọn vẹn phong cách scrambler đặc trưng đã làm nên tên tuổi của dòng xe. Hệ thống đèn hậu và đèn báo rẽ đều đã được nâng cấp lên công nghệ LED hiện đại. Bình xăng được thiết kế lại theo hướng dễ tháo lắp và cá nhân hóa hơn. Trong khi đó, hệ thống ống xả được tinh giản nhằm làm nổi bật khối động cơ, đồng thời tăng thêm vẻ cơ bắp cho tổng thể chiếc xe. Khung sườn cũng được Ducati cải tiến đáng kể. Bộ khung thép ống dạng mắt cáo có trọng lượng nhẹ hơn trước, đồng thời khung phụ phía sau được tách rời khỏi khung chính để tối ưu khả năng sửa chữa và nâng cấp. Ngoài ra, Ducati còn tinh chỉnh lại thông số góc cổ lái nhằm cải thiện độ linh hoạt khi di chuyển trong đô thị hoặc thực hiện các pha chuyển hướng liên tục. Về sức mạnh, Scrambler 100 tiếp tục sử dụng động cơ L-Twin 803cc quen thuộc. Tuy nhiên, Ducati đã thay đổi vật liệu của nhiều chi tiết bên trong, giúp khối động cơ giảm khoảng 2,5kg so với thế hệ trước. Bên cạnh đó, hệ thống ga điện tử Ride-by-Wire với họng ga lớn hơn được trang bị nhằm mang lại khả năng phản hồi mượt mà và chính xác hơn ở mọi dải vòng tua. Nhờ nâng cấp này, xe sở hữu hai chế độ lái tiêu chuẩn gồm Road và Wet, đi kèm hệ thống kiểm soát lực kéo với bốn mức can thiệp khác nhau, giúp người lái tự tin hơn trong nhiều điều kiện vận hành. Nguồn: nghenhinvietnam.vn
08/06/2026

Indian Motorcycle bổ sung Sport Scout RT và Scout Sport Sixty: thêm lựa chọn cruiser thể thao cho nhiều nhóm khách hàng
Indian Motorcycle bổ sung Sport Scout RT và Scout Sport Sixty: thêm lựa chọn cruiser thể thao cho nhiều nhóm khách hàng Tại triển lãm EICMA 2025, Indian Motorcycle tiếp tục mở rộng gia đình Scout bằng hai biến thể mới gồm Sport Scout RT và Scout Sport Sixty. Trong khi Sport Scout Sixty hướng tới nhóm người chơi mới với chi phí tiếp cận dễ chịu hơn, Sport Scout RT lại mang đến phong cách bagger thể thao hiếm thấy trong phân khúc cruiser tầm trung. Đây không phải là thế hệ hoàn toàn mới mà là những phiên bản phát triển từ dòng Scout đã được nâng cấp toàn diện vào năm 2024. Sự xuất hiện của bộ đôi này cũng diễn ra không lâu sau khi Polaris công bố kế hoạch chuyển nhượng phần lớn cổ phần của Indian Motorcycle cho quỹ đầu tư Carolwood LP, dự kiến hoàn tất trong quý I năm 2026. Ở vị trí đầu bảng là Sport Scout RT, mẫu cruiser touring thể thao sử dụng động cơ V-Twin 1.250cc làm mát bằng dung dịch. Khối động cơ 8 van này cho công suất tối đa 92,7 mã lực tại 7.250 vòng/phút cùng mô-men xoắn cực đại 108Nm tại 6.300 vòng/phút. Xe được trang bị hộp số 6 cấp và bình nhiên liệu dung tích 13 lít. Tổng tải trọng cho phép đạt 257kg, trong khi chiều cao yên chỉ 680mm giúp người lái dễ dàng làm quen và kiểm soát xe. Trang bị tiêu chuẩn bao gồm yên solo thể thao, đồng thời khách hàng có thể bổ sung chỗ để chân dành cho hành khách phía sau nếu có nhu cầu. Điểm khác biệt lớn nhất của Sport Scout RT nằm ở bộ thùng hông cứng có khóa, dung tích chứa đồ lên tới 37 lít và có khả năng chống nước. Hai thùng được thiết kế đồng màu với bình xăng và kính chắn gió phía trước, góp phần tạo nên phong cách bagger thể thao đặc trưng. Hoàn thiện diện mạo là bánh trước 19 inch kết hợp đĩa phanh đơn đường kính 298mm cùng ghi-đông thẳng đặt trên riser cao 140mm, mang đến tư thế lái thoải mái cho những hành trình dài. Ở chiều ngược lại, Scout Sport Sixty là lựa chọn dễ tiếp cận hơn trong gia đình Scout. Dù mang tên gọi Sport, mẫu xe này sử dụng động cơ nhỏ hơn với công suất 83,8 mã lực, đi kèm hộp số 5 cấp. Mô-men xoắn cực đại đạt 85Nm tại 6.200 vòng/phút, trong khi trọng lượng vận hành ở mức 249kg. Xét về thiết kế, Scout Sport Sixty gần như giữ nguyên phong cách của người anh em RT. Cả hai cùng chia sẻ bộ phuộc trước đường kính 41mm, hệ thống giảm xóc đôi phía sau có thể điều chỉnh tải trọng và đĩa phanh trước kích thước tương đương. Tuy nhiên, Sport Sixty sở hữu chiều cao yên thấp hơn đáng kể, chỉ 654mm, giúp tăng khả năng tiếp cận cho người mới chơi hoặc người có thể trạng nhỏ. Đây cũng là mẫu xe thứ ba trong dòng Scout Sixty, bên cạnh các phiên bản Bobber và Classic. Khác với RT có nhiều tùy chọn màu sắc, Scout Sport Sixty chỉ được phân phối với màu đen. Xe vẫn được trang bị kính chắn gió mini phía trước và ghi-đông cao tương tự người anh em dung tích lớn hơn. Trang bị tiêu chuẩn trên cả hai mẫu xe đều bao gồm bộ lốp Metzeler Cruisetec, dòng lốp được phát triển dành riêng cho các mẫu cruiser hiệu năng cao, mang lại độ bám và khả năng vận hành ổn định trên nhiều điều kiện mặt đường. Với sự xuất hiện của Sport Scout RT và Scout Sport Sixty, Indian Motorcycle tiếp tục hoàn thiện dải sản phẩm Scout, mang đến thêm lựa chọn cho cả những biker tìm kiếm một chiếc cruiser touring thực dụng lẫn người mới bước chân vào thế giới mô tô phân khối lớn. Nguồn: nghenhinvietnam.vn
07/06/2026
